Як вибрати ESC для рейсингового дрона
В цій статті обговоримо деякі питання, які необхідно знати та враховувати початківцям при виборі ESC для міні-квадриків.
ESC (Electrinic Speed Controller) – електронні регулятори швидкості. Вони отримують сигнал PWM від польотного контролера та керують безколекторними моторами, встановлюючи необхідний рівень електричної потужності.
Номінал струму
Перша річ, на яку варто звернути увагу, при виборі ESC – номінал струму. Номінал струму можна розділити на два типи: тривалий та піковий.
Тривалий номінал струму вказує на максимальну кількість струму, яка може протікати через мотор постійно і безпечно.
ESC також може дозволити протікання дещо більшої кількості струму протягом короткого проміжку часу (наприклад – 10 сек), і ця кількість – піковий номінал ESC.
Деякі початківці помилково вважають, що номінал струму – це кількість струму, яка буде передана на мотори – це не зовсім так. Потрібно розуміти, що використання ESC з більшим номіналом не надає приросту потужності, що передається на мотори.
Рівень споживання струму
Перш ніж вибрати ESC, потрібно визначити, скільки струму ваш мотор+пропеллер разом споживатимуть. Після цього потрібно переконатись, що ESC може опрацьовувати такий обсяг струму.
Наприклад, якщо ви хочете використовувати мотори EMAX RS 2205 на 4s батареї з пропелерами Gemfan 5040 – то на 100% газу споживання струму становитиме 18А, тому 20A ESC буде більш ніж достатньо. Якщо ж із тими самими моторами використовувати пропелери Gemfan 5045×3, то споживання струму на 100% газу становитиме вже 27А, а тому дуже бажано взяти 30A ESC.
Загалом – не страшно, якщо взяти ESC з певним запасом по номіналу струму, але треба відчувати межу. Можна використовувати 30- чи навіть 40-амперні ESC для гвинто-моторної групи, яка споживає 15А і все працюватиме відмінно, але це явний перебір і ви просто додаєте надмірну вагу і вартість своєму коптеру.
Процесор
ATMEL vs SiLabs
Існує 2 основні “сім’ї” мікропроцесорів в контексті радіокерованих квадрокоптерів: ATMEL та SiLabs, Вони мають різну швидкодію та дозволяють виконувати різні прошивки:
- ATMEL може виконувати як SimonK так і BLHeli прошивки
- SiLabs виконує лише BLHeli
Загалом, ATMEL мікропроцесори є більш універсальними, але на даний момент в більшості ESC використовують SiLabs
F330 vs F39X
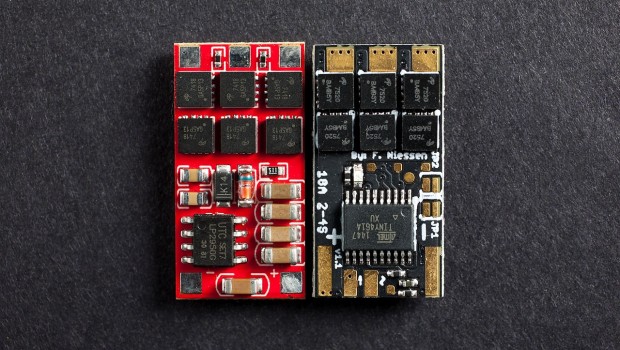
Процесори SiLabs можна розділити на 2 акутальні категорії, які відрізняються швидкодією: F330 та F39x (F390, F396).
F330 має меншу тактову частоту процесора та може мати проблеми при роботі з моторами, як мають високе значення kv. F39x таких проблем не має + чудово підтримує Multisot ESC протокол (в 10 разів швидший ніж OneShot125). Два приклади з популярних решуляторів: FVT LittleBee 20A (F330) та DYS XM20A (F39x).
Busybee (EFM8BB)
Найсвіжіші ESC з прошивками BLHeli_S працюють на BusyBee1 (EFM8BB10F8) та BusyBee2 (EFM8BB21F16) мікропроцесорах. Їхня основна перевага в тому, що замість програмного PWM вони використовують апаратний PWM, що синхронізований з робочим циклом.
8 bit vs 32 bit
Більшість ESC працюють на 8-бітних процесорах, але цього року ми побачили все більше й більше 32-бітних ESC, базованих на STM32, таких як KISS 24A Race Edition, V-Good Firefly, та Gemfan Maverick.
Одначе, ми досі не використовуємо на повну навіть ресурс 8-бітних мікропроцесорів, тому приріст в ефективності особливо не помітний. Зате з’являються такі додаткові функції, які були не доступними на 8-бітних процесорах, як “ESC телеметрія” із KISS 24A чи “Зміна напрямку обертання при старті” із Firefly.
По великому рахунку, знати багато про процесори вам не потрібно, значно важливішими є прошивки, які на них виконуюься.
Прошивки
SimonK та BLHeli
На даний момент двома основними прошивками ESC для мультироторних систем є SimonK та BLHeli. Обидві прошивки є програмним забезпеченням з відкритим вихідним кодом.
Більшість користувачів обирають BLHeli через більш дружній інтерфейс та більші можливості по налаштуванню.
BLHeli_S
Зовсім недавно було розроблено нову прошивку – BLHeli_S, спеціально для ESC, які мають апаратний PWM. На даний момент ще не дуже багато ESC підтримують BLHeli_S, наприклад DYS XS чи Aikon SEFM 30A ESC.
KISCC ESC
Ще одна відома прошивка – KISS ESC. Але це ПЗ з закритим кодом, а це несправедливо, тому ми на ній не будемо зупинятись 🙂
Bootloader
І ще одна річ, що має стосунок до прошивок – bootloader/загрузчик. Це така собі маленька програмка, яку потрібно встановити на ESC для того, щоб його вантажити та отривувати доступ до нього.
Зараз, купуючи ESC з предустановленою прошивкою BLHeli, bootloader також йде вже встановлений, тому користувачі зазвичай не мають перейматись цим питанням. Але деяку інфу для допитливих наведу 🙂
Так от, без бутлоадера ви зможете прошити чи змінити конфігурацію ESC лише з’єднуючись напряму з чіпом процесора (або до спеціальної площадки для паяння, якщо така виведена). Ну і під час прошивання ESC в такий спосіб, одночасно можна встановити й bootloader.
І SimonK і BLHeli мають свої власні загрузчики. Загрузчик BLHeli є гнучкішим та має більше можливостей. За наявності загрузчика прошивку можна здійснювати як через сигнальний кабель, так і через польотний контролер.
Вага та розмір
ESC що використовуються на міні-квадрокоптерах в наш час мають досить стандартні розміри та вагу – приблизно 4-6 грам кожен. Не зважаючи на те, що для перегонів ми прагнемо отримати квад мінімальної ваги, однак ESC мабуть не найкращий елемент для її зменшення.
Підтримка OneShot, активного тормозіння та апаратного PWM
Існує кілька ключовиї можливостей ESC про які потрібно знати:
- Oneshot125, Oneshot42 та Multishot – це є швидші ESC протоколи, покращені зі звичайного PWM сигналу
- Damped Light – так зване активне гальмування. Покращує швидкість відклику на зменшення рівня газу
- Апаратний PWM – покращує плавність роботи та чутливість моторів на управління
- Виділений драйвер затвора (dedicated gate driver) – дешеві ESC використовують транзистори для керування затворами FET-ів, але використання виділеного драйвера затвора покращуж активне гальмування.
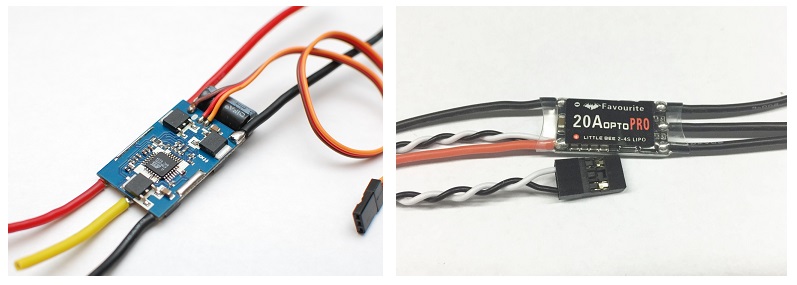
ESC із та без BEC (понижувач напруги)
Деякі ESC містять інтегровані понижувачі напруги, що видають 5В (які можна використовувати для живлення польотного контролера чи радіо-приймача).
ESC що не містять BEC мають так переваги: легші, менші та менш “шумні” (оскільки схема контролю мотора фізично відокремлена від раді0-приймача та контролера польоту).
ESC без BEC, натомість, вимагають окремого джерела для живлення передавача та “мозку”. Такі BEC не мають “червоного” серво кабеля, лише землю і сигнальний провід.
ESC з BEC зліва,та без BEC справа:
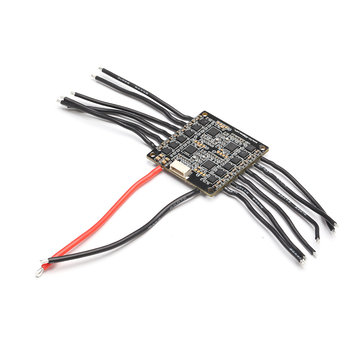
ESC 4 в 1
Варіант, коли всі 4 ESC інтегровані в одну плату типорозміру польотного контролера дозволяє істотно зменшити кількість проводів, що, в свою чергу дозволяє трохи зекономити на вазі а також забезпечує естетичну, “чисту” зборку. Але такий варіант має й дуже вагомий недолік – якщо згорить 1 ESC, це означає необхідність заміни цілої плати. Такий собі компроміс між ризиком та зручністю.
Related Posts

Дрон-рейс: людина проти штучного інтелекту →

Топ 5 найкращих ESC для гоночних коптерів [Квітень 2017] →

Топ 5 найкращих LiPo акумуляторів 4S [Квітень 2017] →






Pingback: Топ 5 найкращих ESC для гоночних коптерів [Квітень 2017] - Перегони Дронів в Україні